Home
Conference Center - Room 304 (Monday 13th Mey 2024)
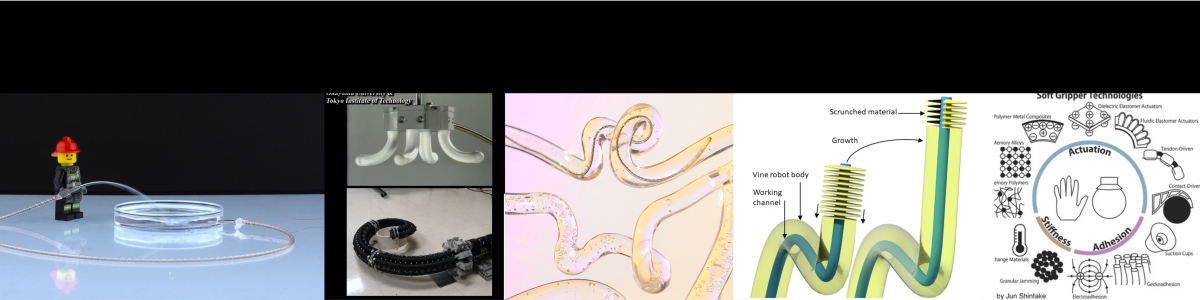
Photos of the event
Abstract
In recent decades, continuum and soft robots have been widespread for medical applications, but not limited, especially MIS (Minimal Invasive Surgeries) and NOTES (Natural Orifices Transluminal Endoscopic Surgeries). The community is constantly growing with innovative ideas and approaches proposed by talented researchers. Thus, the number of labs over the world is constantly increasing which demonstrates the potential impact of continuum and soft robots. Methods for design, modeling, and simulation of continuum and soft robots have demonstrated some outstanding advancements. However, the challenges of sensing, efficient actuation, and control in interaction with uncertain environments are still being to be overcome.
The objective of this workshop is for participants to review and discuss the most recent advances in terms of recent design and innovative mechanisms. Modeling approaches, stability issues, and the control strategy, which are intimately linked, will be covered, as well as open challenges like follow-the-leader deployment, self-growing robot, patient-specific design, variable stiffness mechanism, reconfigurable structure, data-driven approach for robot control, advance in the development of materials.
Context
Continuum and soft robotics have identified as hot topics in Science Robotics Review, Dupont et al. based on the bibliometric analysis of papers on medical robotics published in 2010–2020. This two new kinematics have led to significant advances in surgery in recent decade especially to address single ports or natural orifices, and to reach difficult to access sites (T-Ro, Burgner-Kahrs et al., and Nature Review Materials, Cianchetti et al.).
Objectives
The objectives of this workshop are twofold. First, it will bring two communities from surgical robotics and soft robotics around the design of continuum and soft robots for medical applications. This workshop will bring together world-class researchers to present pioneer research results in continuum and soft robotics and the potential challenges for creating and implementing these robots for clinical applications. Second, the workshop will be a unique chance to put the spotlight on young talented researchers – rising stars combined with two historical actors on soft and continuum robotics.
The workshop will be started by two inaugural presentations and will be continued by 10 invited talks. A poster presentation session will be held during the breaks and a round-table discussion and Q&A session is considered for the end of the workshop.
Topics of interest
- Continuum robot
- Soft robot
- Actuated needles, catheters, and flexible instruments
- Patient-specific design
- Modeling and simulation of continuum robots
- Follow-the-leader deployment
- Vine-like-robot or eversion robot
- Variable stiffness mechanism
- Shape and force sensing